- 2461
- 产品价格:1.00 元/台 起
- 发货地址:上海松江新桥 包装说明:SIEMENS
- 产品数量:1111.00 台产品规格:台
- 信息编号:115945431公司编号:13930730
- 田源 销售经理 微信 152017638..
- 进入店铺 在线咨询 QQ咨询 在线询价
西门子S120-张掖西门子变频器代理商
- 相关产品:
西门子代理商
西门子中国代理商
西门子plc代理商
SIEMENS/西门子S120变频器,S120驱动系统,伺服驱动轴卡 数控主板 西门子停产数控主板 西门子代理商 西门子中国代理商 西门子变频器代理商 西门子PLC模块代理商 西门子触摸屏代理商 上海君俞自动化科技有限公司
西门子S120-张掖西门子变频器代理商
西门子S120驱动系统
上海君俞自动化科技有限公司(西门子代理商)
我公司经营 SIEMENS/西门子 PLC;S7-200 SMART、S7-200CN、S7-300、S7-400、S7-1200、S7-1500、LOGO、触摸屏、MM系列变频器、6FC、6SN、 G120、S120 、V20、 V90 伺服数控备件:西门子保内全新原装产品‘质保一年。一年内因产品质量问题免费更换新产品;不收取任何费。欢迎致电咨询。
西门子S120变频器_西门子 SINAMICS S120模块化运动控制驱动器适用于机械与系统工程中的高性能驱动应用。西门子的高性
能驱动系统为您提供了广泛而相互协调的组件与功能,可作为一个全面的运动控制驱动系统使用。这些运动控制驱动器包括高性
能单轴驱动器和多轴共直流母线驱动器,具有矢量控制或伺服控制,可实现量身定制的高性能驱动解决方案。SINAMICS S120
运动控制驱动器是一种高性能驱动器,使用灵活,可提高生产效率。除具有创新的系统结构和数字通信功能外,这些运动控制驱
动器还提供了创新的工具,并且接线简便,从而可进行高效组态与快速调试。SINAMICS S120功率范围为0.12-4500kW,
具有各种结构形式和冷却方式。
S120驱动系统
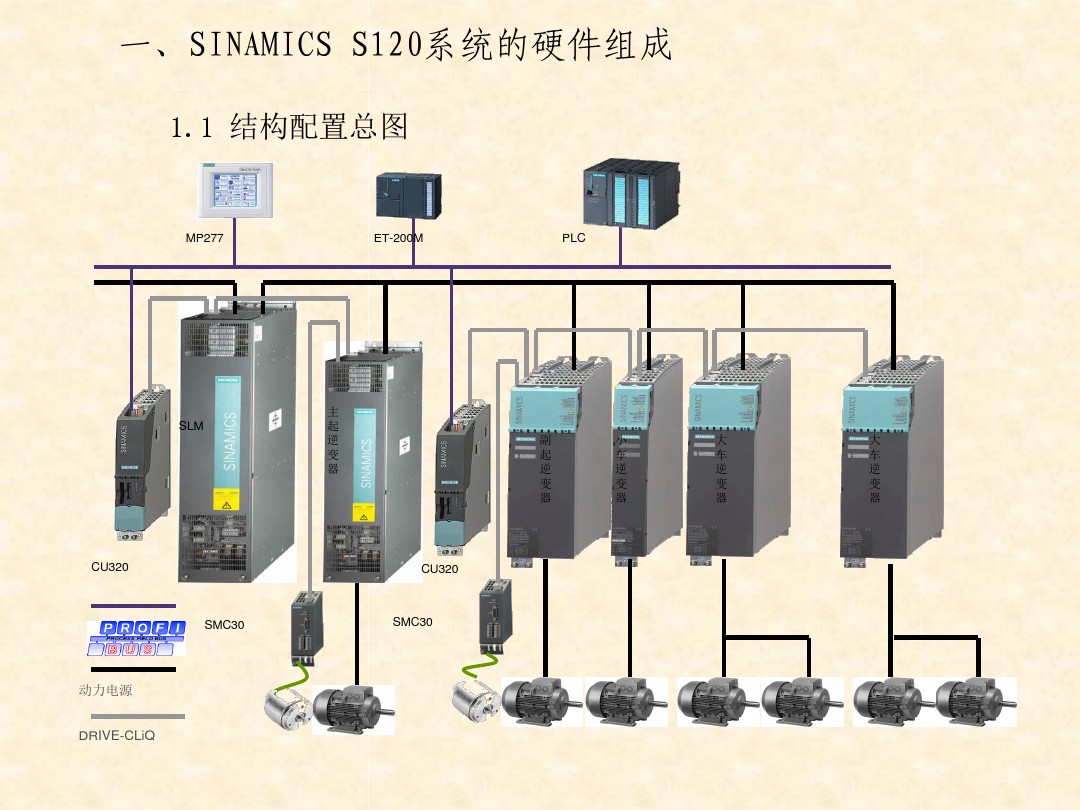
根据控制的电机轴数,SINAMICS S120驱动系统分为以下两个大类:
DC/AC 驱动器:**的多轴应用解决方案
一个智能控制单元负责控制整个驱动器组(包括与上位控制器或HMI的通讯接口);一个电源模块为驱动器组提供电源;一个或多个电机模块驱动电机;可选的端子模板用来连接编码器和扩展输入/输出通道。
AC/AC 驱动器:单轴应用解决方案
交流驱动器由一个控制单元和一个功率模块组成,功率模块包含整流部分及逆变部分;作为多轴系统的扩展时可以使用CU适配器; 可选的端子模板用来连接编码器和扩展输入/输出通道。
S120的特点
SINAMICS S120是西门子公司推出的全新的集V/F、矢量控制及伺服控制于一体的驱动控制系统,它不仅能控制普通的三相异步电动机,还能控制同步电机、扭矩电机及直线电机。SINAMICS S120具有模块化设计,可以提供高性能的单轴和双轴驱动,功率范围涵盖0.12 kW – 4500 kW,具有广泛的工业应用价值。由于其具有很高的灵活性能,SINAMICS S120可以**的满足应用中日益增长的对驱动系统轴数量和性能的要求。它具有以下特点:
“高度灵活”的模块化设计
允许不同功率等级与控制性能的单元自由组合,所有系统组件之间都具有高度的兼容性,同时还可通过简单并联就可实现功率的增容。
“一网到底”的通讯技术
上位通讯支持标准的 PROFIBUS DP 现场总线或新一代高速工业以太网技术 PROFINET,可以方便地集成到工厂 IT 环境,传动组件之间采用*特的DRIVE-CLiQ通讯。
“一心多用”的多机控制技术
一个控制单元就可同时控制多达四台逆变和一台整流,所需数据都保存在控制单元中,在控制单元内就能建立轴间连接和控制,保证系统高效可靠运行。
智能化的驱动组件链路——DRIVE-CLiQ
基于网络技术的全新传动串行通讯,用于传动组件之间的通讯。DRIVE-CLIQ 组件都有一个电子铭牌,各项技术数据都将自动装载到控制单元中,从而读取拓扑结构,实现 SINAMICS 驱动系统的自动配置。
装置并联的“无环流设计”
由于选用了新一代高性能 IGBT 和*特的均流控制技术,装置并联增容时,只需满足较短电机电缆的要求就可,而*笨重而昂贵的平衡电抗或输出电抗器。
四象限运行的“IGBT智能整流”
全新的 IGBT 整流 ——SLM,在实现四象限运行的基础上,成功避免了换流故障,又免除了传统晶闸管正反桥整流/回馈所需的自耦变压器,大大提高了传动系统的可靠性。
S120驱动系统驱动第三方同步伺服电机时,需要确定电气磁较位置。对于具有**位置信息(如带有**值编码器或带有C/D信号的增量编码器,或带有两较旋转变压器)
且已经进行机械校准的同步电机不需要进行磁较位置识别。
目录
1 概述 3
2. 磁较位置识别方法和步骤 4
1 概述
S120驱动系统驱动第三方同步伺服电机时,需要确定电气磁较位置。对于具有**位置信息(如带有**值编码器或带有C/D信号的增量编码器,或带有两较旋转变压器)
且已经进行机械校准的同步电机不需要进行磁较位置识别。除此之外的以下情况均需进行磁较位置识别:
1. 未进行机械校准的具有**位置信息的同步电机
2. 带有增量编码器(无C/D信号)的同步电机
3. 带有多较旋转变压器的同步电机
4. 更换了编码器的同步电机
5. 不带编码器的同步电机
2 磁较位置识别方法和步骤
对于第三方具有**位置信息的同步伺服电机和更换了**值编码器或带有C/D信号的增量编码器或两较旋转变压器的同步电机需要进行一次性磁较位置识别,设置如下:
1. 通过 p1980 选择一个方法。
2. 设置 p1990 = 1,启动一次性磁较位置识别。
---在给出下一个脉冲使能信号时会执行测量,并将测出的角度差(p1984)记录在p0431 中,辨识完成后P1990会自动变回0。需要执行“copy RAM to ROM”的操作以保存参数。
对于带有增量编码器(无C/D信号)或多较旋转变压器的同步电机以及不带编码器的第三方同步伺服电机需要进行磁较位置识别,设置如下:
1. 通过 p1980 选择一个方法。
2. 设置 p1982 = 1,启动磁较位置识别。
---在每一次给出脉冲使能信号后都会执行一次磁较位置识别。
S120常见故障F07900排查方法
S120作为一款高性能伺服驱动器,其强大的功能和优越的控制性能得到了广大用户的一致**和青睐。借助强大的调试软件可以方便完成S120的调试,但对于初步接触和使用该产品的工程师来说,调试过程中往往会遇到一些简单的故障由于缺乏经验而导致排查过程中走了弯路,本次我们来介绍一下S120常见故障F7900及其排查方法。
1 概述
S120作为一款高性能伺服驱动器,其强大的功能和优越的控制性能得到了广大用户的一致**和青睐。借助强大的调试软件可以方便完成S120的调试,但对于初步接触和使用该产品的工程师来说,调试过程中往往会遇到一些简单的故障由于缺乏经验而导致排查过程中走了弯路,本次我们来介绍一下S120常见故障F7900及其排查方法。
2 F07900故障排查
首先来看一下什么是F07900故障?产生此故障的判断依据是什么?
电机长时间以转矩极限值工作,**出了 p2177 中设置的时间,且转速低于 p2175 中设置的转速阈值,S120 驱动就会发出F07900电机堵转报警。
可以按照以下流程进行故障排查:
几点说明:
(1) 实际生效的转矩限幅为电流限幅、转矩限幅、功率限幅换算为转矩的较小值,逻辑图如下,所以在观察到R1538,R1539为0或很小的时候应该判断哪个限幅生效并修改。
(2) 如果空电机不带负载运行正常,带载运行报故障F7900,此时应该核算驱动器和电机是否过载,如过载,需要更换大的电机及驱动器或减小负载;如未过载,可以通过减小P2175或增大P2177解决。
(3) 对S120驱动第三方伺服电机的情况,有可能出现P1300=20能正常运行,且此时R60与R61大小相同符号一致,但P1300=21运行报故障F7900的情况,此时应该进行**值编码器调校P1990=1(对**值编码器和带有C/D信号的增量编码器)或磁较位置识别P1982=1(对增量编码器)。
如按以**程检查,可解决大部分F7900故障。
如何启动SINAMICS S120的电源模块?
功能库“SINAMICS DriveLib”支持控制SINAMICS S120的相关功能。其中功能库中的“SINA_INFEED”功能块支持控制SINAMICS S120电源模块。
在您通过SIMATIC S1500(T)的运动控制功能控制相关的SINAMICS S120设备之前,SINAMICS S120的电源模块必须已经被启动,同时当前驱动中必须已经接收到“Supply mode”信号。如果情况不是这样的话,那么驱动或者工艺对象将会出现错误状态,在较坏的情况下,可能会损坏电源模块。
如何启动电源模块和驱动如何收到“Supply mode”信号取决于电源模块使用的类型:
- SINAMICS S120电源模块不带DRIVE-CLIQ接口:
电源模块通过端子启动,电源模块的运行通过EP端子。电源模块的“运行”信号通过RDY端子输出,这个信号必须在配置相关驱动的时候连接到“Supply mode”信号。
-
SINAMICS S120 电源模块带DRIVE-CLIQ接口:
电源模块的启动和停止通过与SIMATIC S7-1500(T)通讯配置的370报文,通过370报文需要的BICO互连会自动在驱动的电源模块中生成。“SINAMICS DriveLib”功能库中的“SINA_INFEED”功能块可以用来启停和诊断通过DRIVE-CLIQ连接的SINAMIC S120电源模块。
包含“SINA_INFEED”的“SINAMICS DriveLib”的功能库和相关文档在以下链接中
联系电话是15802142282, 主要经营专业代理销售 SIEMENS 西门子 可编程控制器,及西门子停产备件 ! 西门子PLC模块-S7-200 300 400 1200 1500 ET200,西门子变频器, 西门子伺服数控,6GK, LOGO,西门子人机界面(触摸屏), 西门子交、直流传动装置,数控主板 等。。
单位注册资金单位注册资金人民币 250 - 500 万元。
{kind=link}